This is where navigation should be.
GSP_DESIGN_HELD - Create a Held filterbank
Usage
g = gsp_design_held( G ); g = gsp_design_held( G, param );
Description
- Inputs parameters:
- G : Graph structure or lmax param : Structure of optional parameters
- Outputs parameters:
- g : filterbank
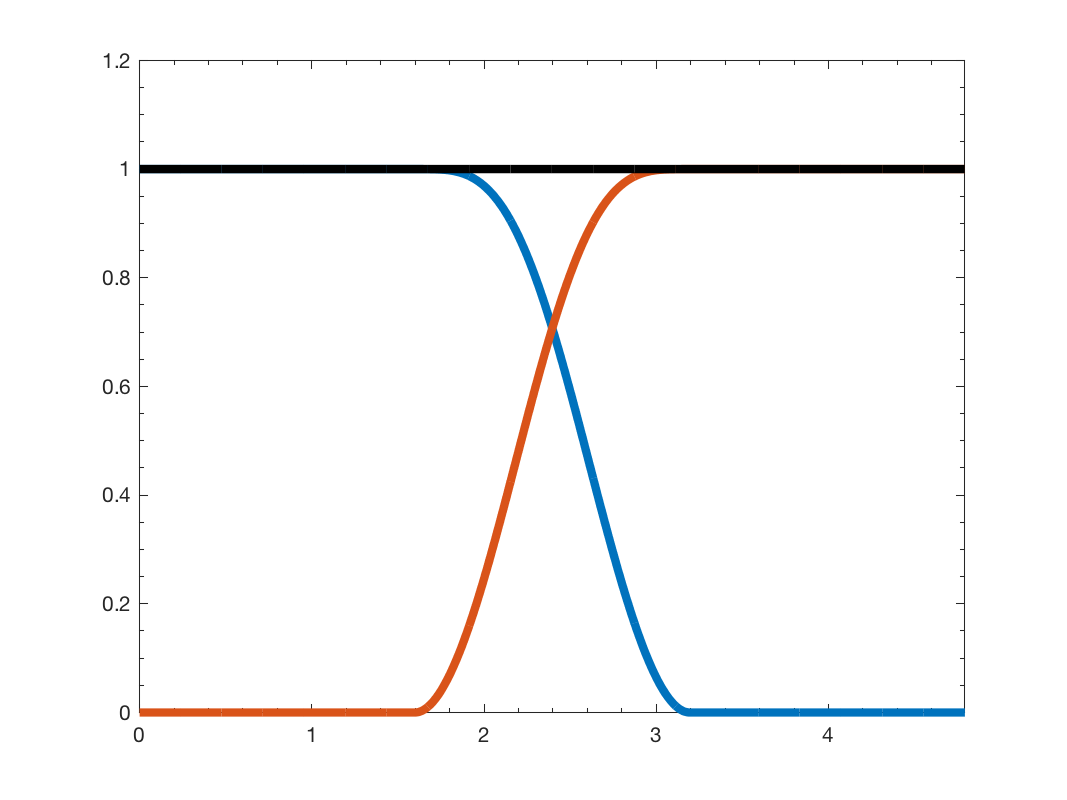
This function create a parseval filterbank of \(2\) filters. The low-pass filter is defined by a function \(f_l(x)\):
\begin{equation*}
f_{l}=\begin{cases} 1 & \mbox{if }x\leq a\\\\ \sin\left(2\pi\mu\left(\frac{x}{8a}\right)\right) & \mbox{if }a<x\leq2a\\\\ 0 & \mbox{if }x>2a \end{cases}
\end{equation*}
with
\begin{equation*}
\mu(x) = -1+24x-144*x^2+256*x^3
\end{equation*}
The high pass filter is adaptated to obtain a tight frame.
This function will compute the maximum eigenvalue of the laplacian. To be more efficient, you can precompute it using:
G = gsp_estimate_lmax(G);
Example:
G = gsp_sensor(100); G = gsp_estimate_lmax(G); g = gsp_design_held(G); gsp_plot_filter(G,g); [A,B] = gsp_filterbank_bounds(G,g)
This code produces the following output:
A =
1.0000
B =
1.0000
param is an optional structure containing the following fields
- param.verbose: verbosity level. 0 no log - 1 display warnings. (default 1)
- param.a: see equations above for this parameter. Note that the spectrum is scaled between 0 and 2 (default 2/3).